






























































CUAV Pixhawk V6X
320.00 $ – 1150.00 $

Customer Product Gallery




Description
Introducing CUAV Pixhawk V6X
CUAV Pixhawk V6X autopilot (the latest product by CUAV) is a UAV Drone Flight Controller based on FMUv6 that is ideal for use by both experts and hobbyists in the drone field. The FMUv6X open-hardware standard includes high-performance and low-noise IMUs on board that helps improve stabilization.
Unmatched Performance and Reliability
CUAV Pixhawk V6X is designed to provide the ultimate performance, stability, and reliability in all aspects.
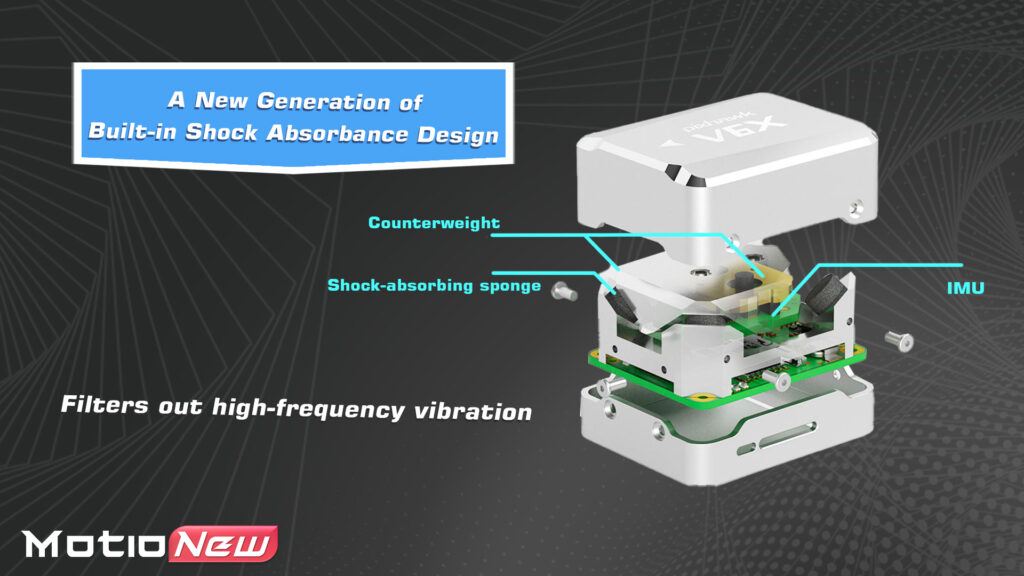
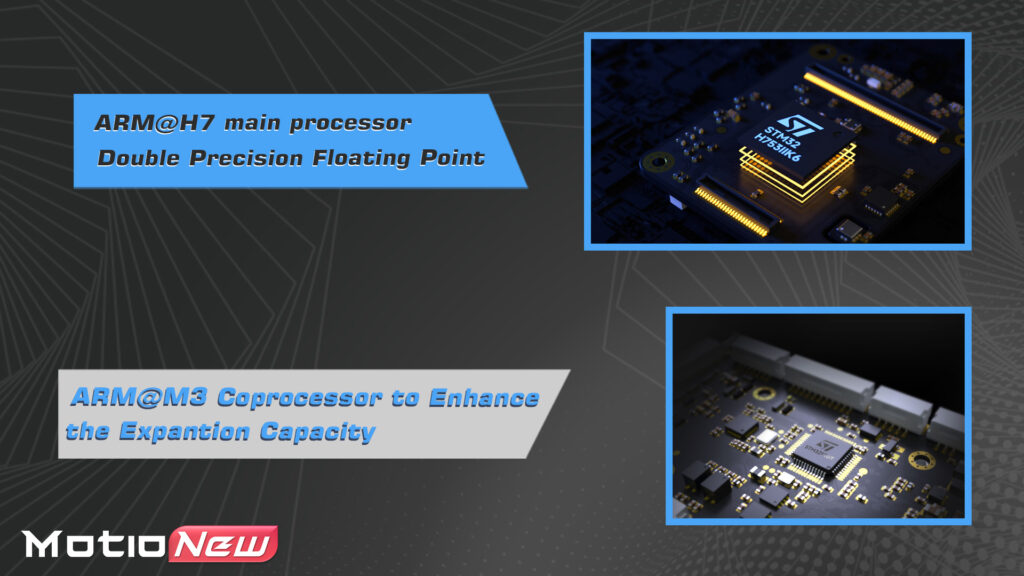
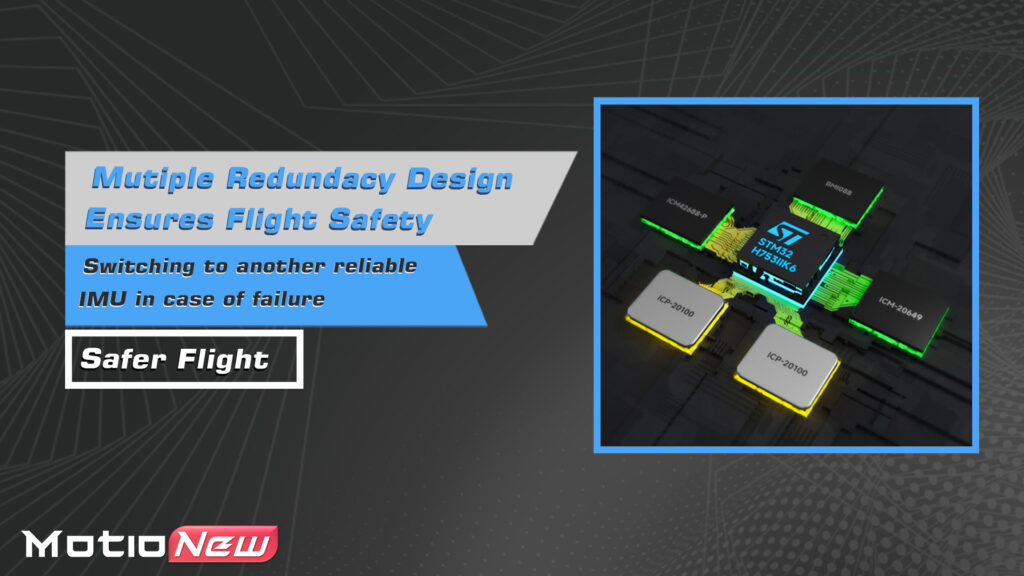
Redefining Performance and Reliability with STM32H7 CPU and Advanced Redundancy Features
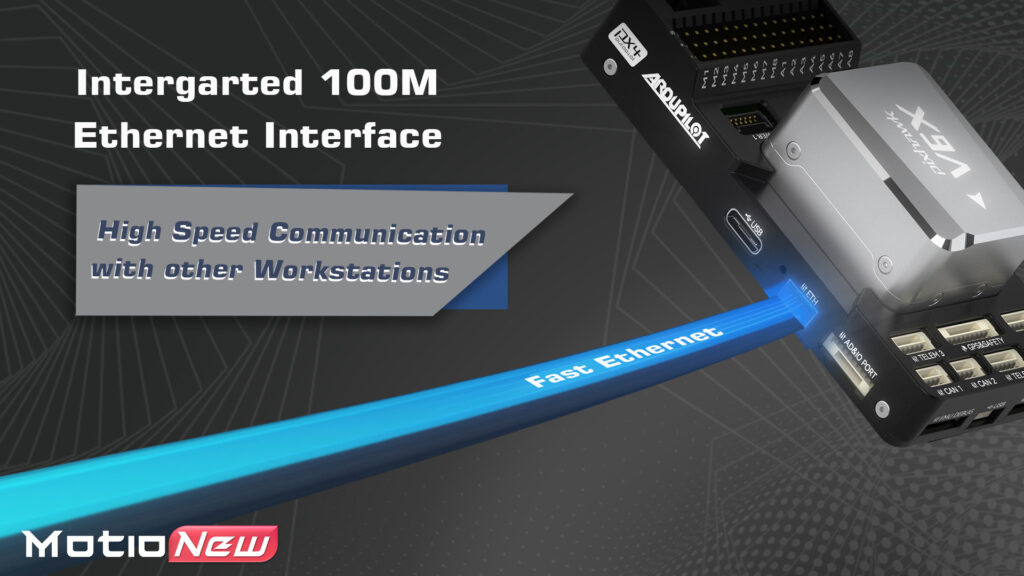
CUAV Pixhawk V6X features STM32H7 CPU, and a new built-in shock absorption design isolates IMUs and other sensitive sensors. Everything inside V6X comes with redundancy and precision — redundant IMUs, and double redundant barometers with an independent bus. When one IMU fails, the system seamlessly switches to another IMU sensor safely without interrupting the flight. Moreover, IMU heating further improves performance. Integrated Ethernet feature for high-speed connections to companion computers — Raspberry Pi, BeagleBone, or other types of Mini PCs based on your requirements.
Military-Grade Magnetometer for Improved Maneuvering
Using a Military-Grade Magnetometer RM3100 is helpful in better maneuvering in noisy environments with extreme electromagnetic field interference.


Specifications
| Specifications | |
| Main FMU Processor | STM32H753IIK6
STM32F103 |
| Accelerometer/Gyroscope | Bosh BMI088 IMU (accel, gyro) |
| Accelerometer/Gyroscope | InvenSense ICM-20649 IMU (accel, gyro) |
| Accelerometer/Gyroscope | InvenSense ICM-42688-P IMU (accel, gyro) |
| Magnetometer | RM3100 |
| Barometer | Dual ICP-20100 barometers |
| Other Characteristics | ||
| Weight | Flight Controller and Module | 99g |
| Core module | 43g | |
| Baseboard | 56g | |
| Operating temperature | -20 ~ 85°c | |
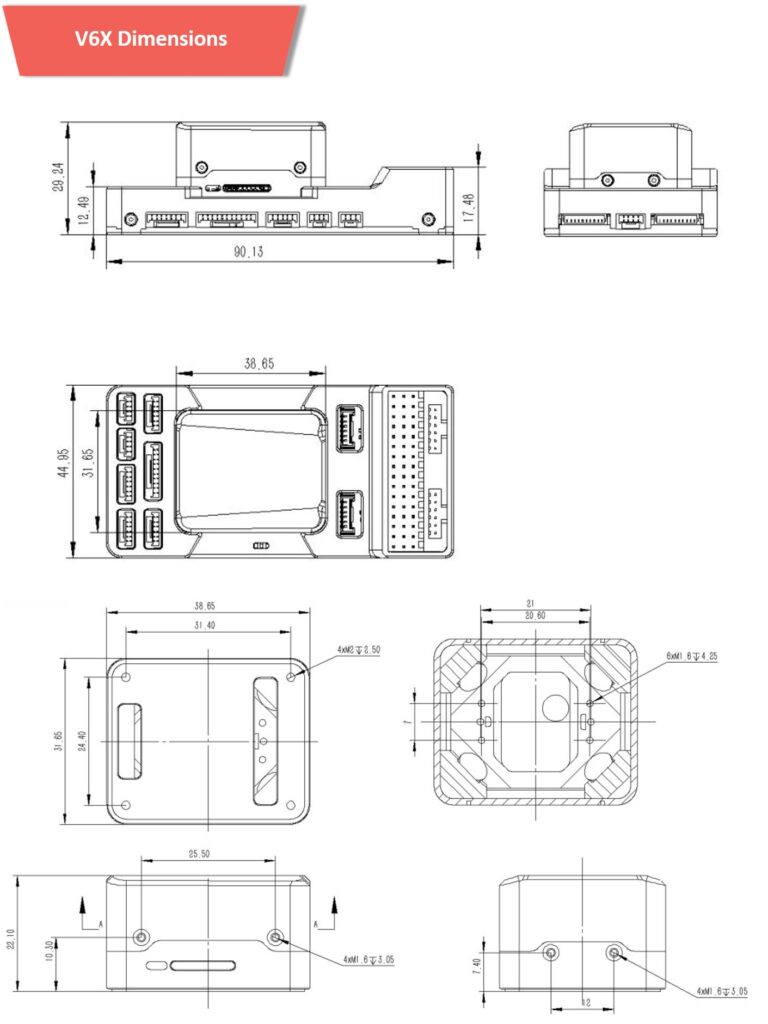
| Dimensions | Flight Controller and Module | 90.13×29.24×44.95mm |
| Core module | 31.65×22.1×38.65mm | |
| Baseboard | 90.13×29.24×17.48mm | |
| Power System | |
| Power | 4.75~5.45V |
| Servo Rail Input | 0~9.9V |
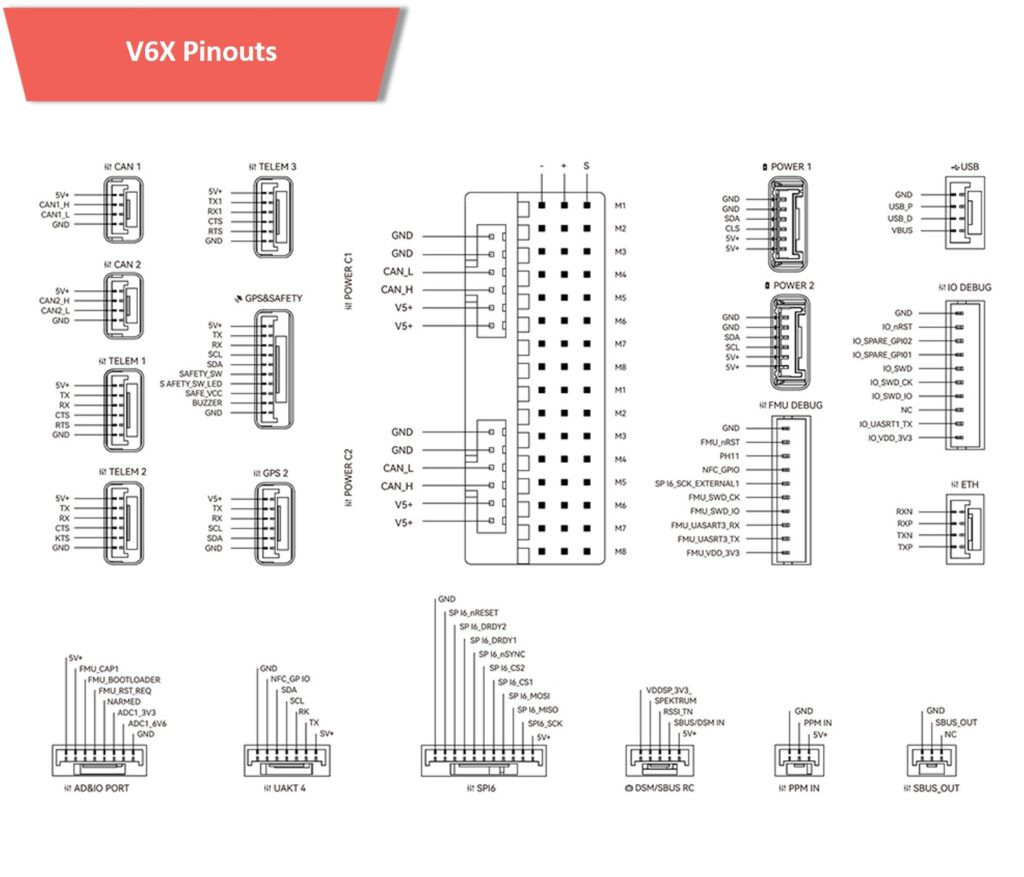
| Interfaces | |
| PWM outputs | 16x |
| TELEM Ports | 3x with full flow control |
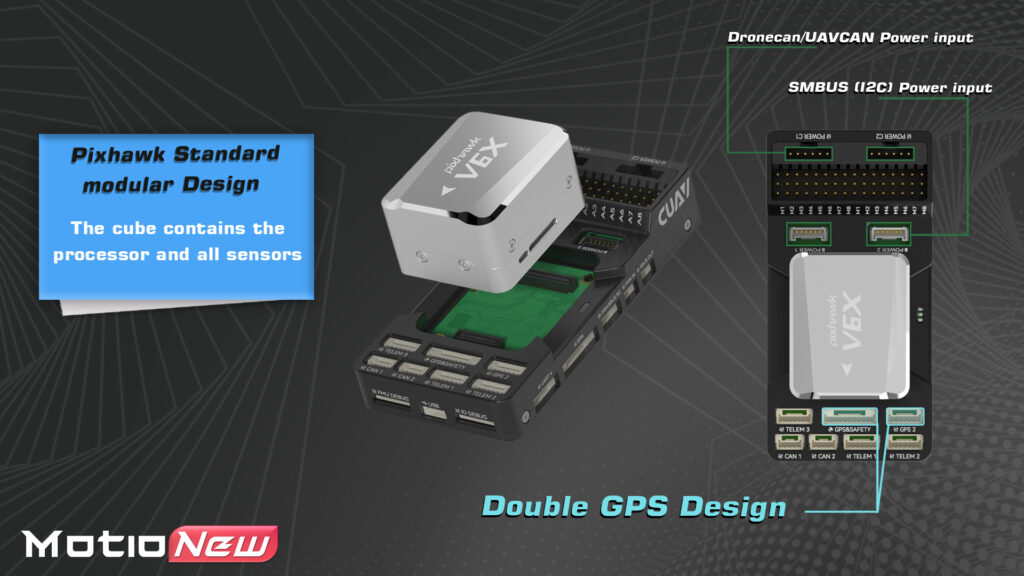
| 2x GPS ports | 1x full GPS plus Safety Switch Port(GPS1) 1x basic GPS port(with I2C,GPS2) |
| 2x USB Ports | 1x TYPE-C 1x JST GH1.25 |
| Ethernet port | Transformerless Applications 100Mbps |
| 1x SPI bus | 2x chip select lines 2x data-ready lines 1x SPI SYNC line 1x SPI reset line |
| 2x CAN Buses for CAN peripheral | CAN Bus has individual silent controls or ESC RX-MUX control |
| 4x power input ports | 2x DroneCAN/UAVCAN power inputs 2x SMBUS/I2C power inputs |
| 1x AD & IO port | 2x additional analog inputs (3.3 and 6.6v) 1x PWM/Capture input |
| 2x Dedicated debug | FMU debug IO debug |
| 1 Dedicated R/C input for Spektrum / DSM and S.Bus with analog / PWM RSSI input | |
Product contents
Related products
-

-
Sale!
CUAV Airspeed Sensor MS4525 with Pitot Tube
- Original price was: 75.00 $.69.00 $Current price is: 69.00 $.
-
Sale!
-
-
NEW Holybro Pixhawk 6C UAV Flight Controller
- 149.00 $ – 277.00 $
-
-
-
Pixhawk 5X Holybro with STM32F7
- 120.00 $ – 359.00 $
-
-
-
NEW Holybro Pixhawk 6X UAV Flight Controller ICM-45686
- 149.00 $ – 384.00 $
-










1 review for CUAV Pixhawk V6X