


























































Pixhawk Holybro 4 Mini ,UAV Autopilot Flight Controller
158.85 $ – 239.82 $

Description
Pixhawk Holybro 4 Mini Overview
The Pixhawk® Holybro 4 Mini autopilot is designed for engineers and hobbyists who are looking to tap into the power of Pixhawk 4 but are working with smaller drones. Pixhawk 4 Mini takes the FMU processor and memory resources from the Pixhawk 4 while eliminating interfaces that are normally unused. This allows the Pixhawk 4 Mini to be small enough to fit in a 250mm racer drone.
Pixhawk 4 Mini was designed and developed in collaboration with Holybro® and Auterion®. It is based on the Pixhawk FMUv5 design standard and is optimized to run PX4 flight control software.




If you have any questions regarding our products, use the Motionew Contact us page to consult our engineering team.
Specifications
- Model Number: Pixhawk 4 mini
- Package: Yes
- Model Number: Pixhawk 4 mini
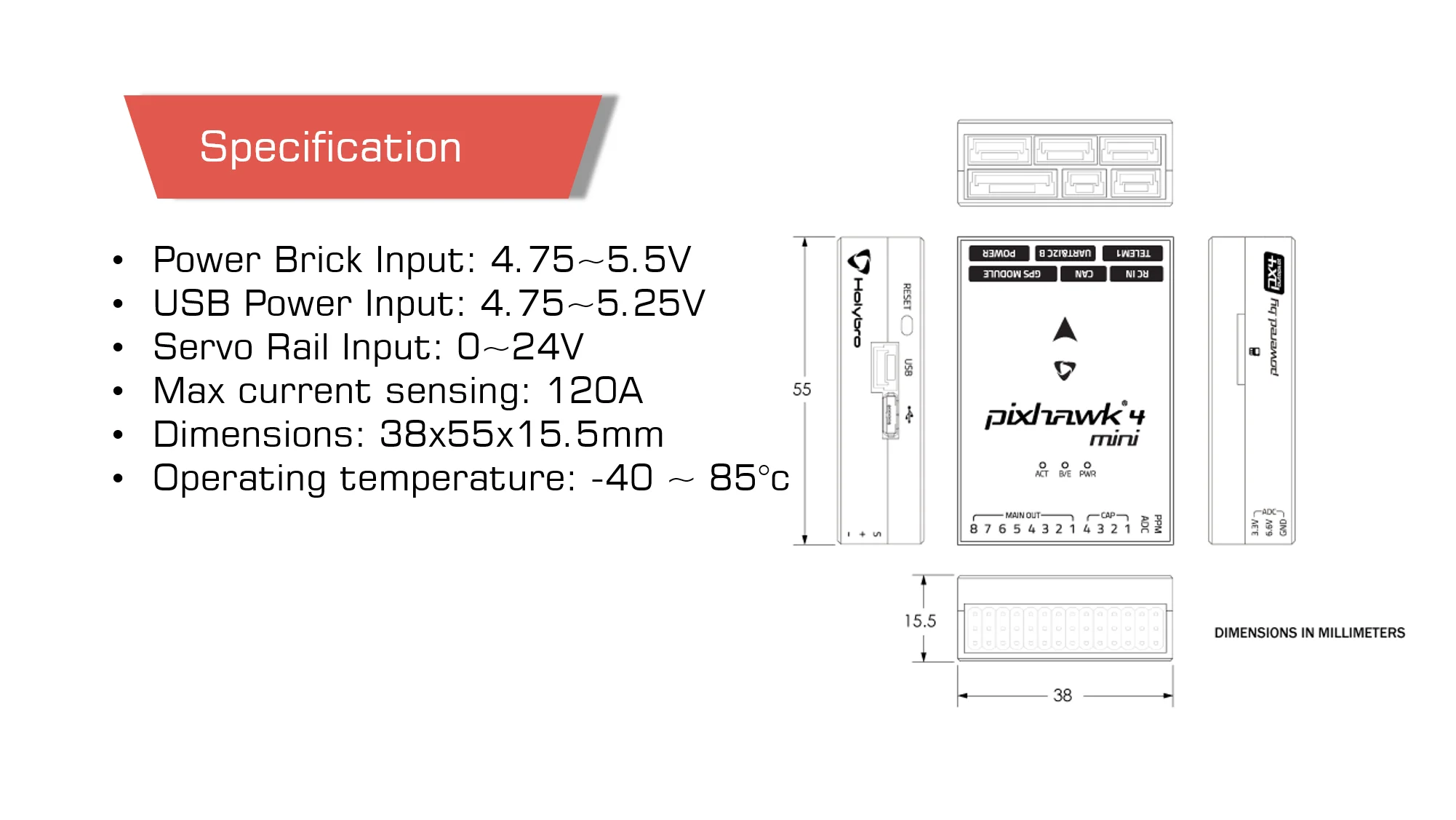
- Dimension: 38x55x15.5mm
- Operating temperature: -40 ~ 85°c
- Case Material: Aluminum
- PWM Output: 8
- Memory: 2MB
- RAM: 512KB
- Weight: 37.2g
- USB Power Input: 4.75~5.25V
- Power Brick Input: 4.75~5.5V
- Main FMU Processor: STM32F765
- Main FMU Processor: STM32F765
- 32 Bit Arm® Cortex®-M7, 216MHz, 2MB memory, 512KB RAM
- On-board sensors:
- Accel/Gyro: ICM-20689
- Accel/Gyro: BMI055
- Magnetometer: IST8310
- Barometer: MS5611
- GPS: ublox Neo-M8N GPS/GLONASS receiver; integrated magnetometer IST8310
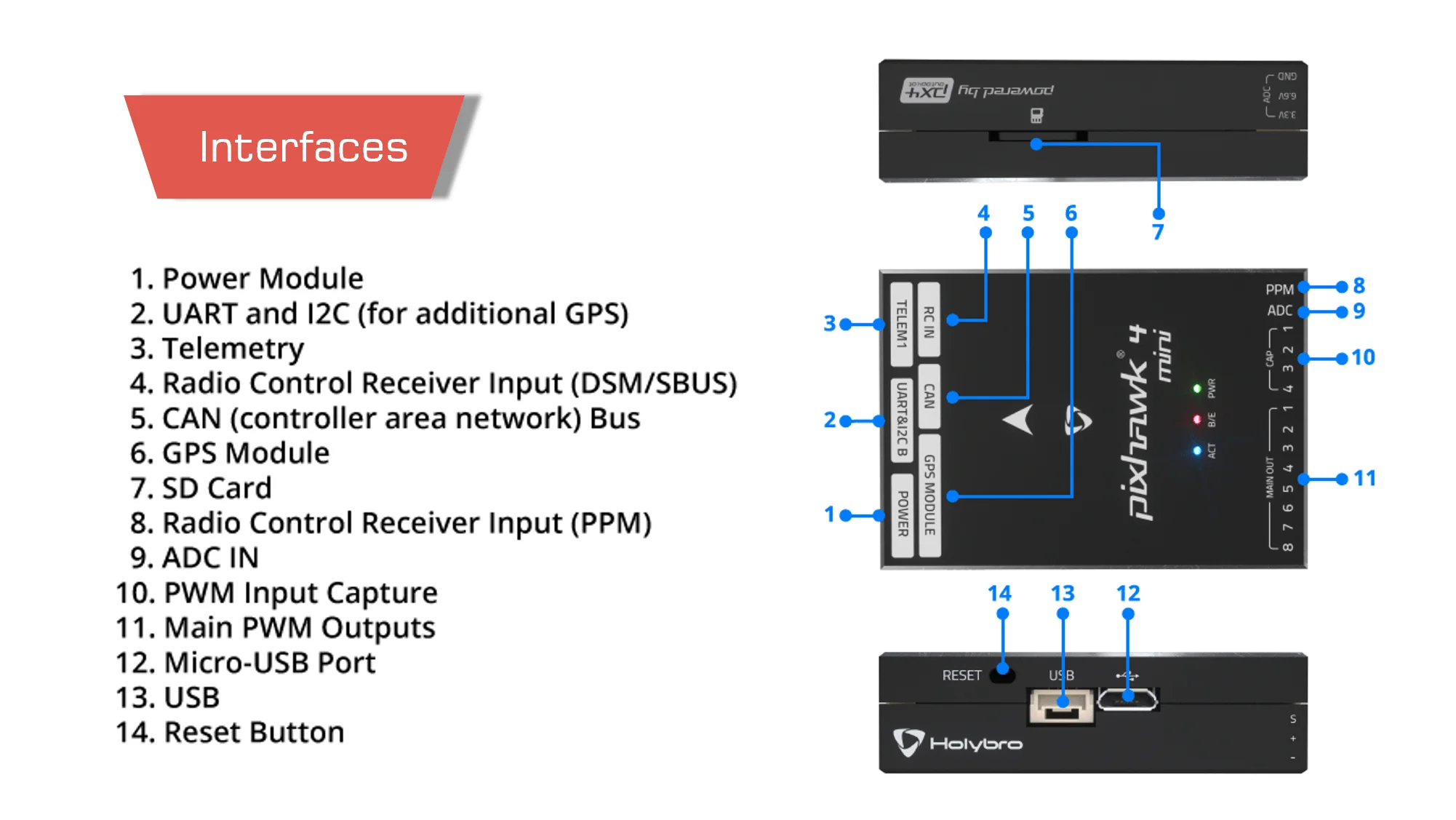
- 8 PWM outputs
- 4 dedicated PWM/Capture inputs on FMU
- Dedicated R/C input for CPPM
- Dedicated R/C input for Spektrum / DSM and S.Bus with analog / PWM RSSI input
- 3 general purpose serial ports
- 2 I2C ports
- 3 SPI buses
- 1 CANBuses for CAN ESC
- Analog inputs for voltage / current of battery
- 2 additional analog input
- Power Brick Input: 4.75~5.5V
- USB Power Input: 4.75~5.25V
- Servo Rail Input: 0~24V
- Max current sensing: 120A

Product contents
Product contents
Documents
Please contact us for more information.
Related products
-

-
Sale!
CUAV Airspeed Sensor MS4525 with Pitot Tube
- Original price was: 75.00 $.69.00 $Current price is: 69.00 $.
-
Sale!
-
-
NEW Holybro Pixhawk 6X UAV Flight Controller ICM-45686
- 149.00 $ – 384.00 $
-
-
-
Sale!
Pixhawk CUAV V5 Nano Autopilot Drone
- 169.00 $ – 998.00 $
-
Sale!









1 review for Pixhawk Holybro 4 Mini ,UAV Autopilot Flight Controller