














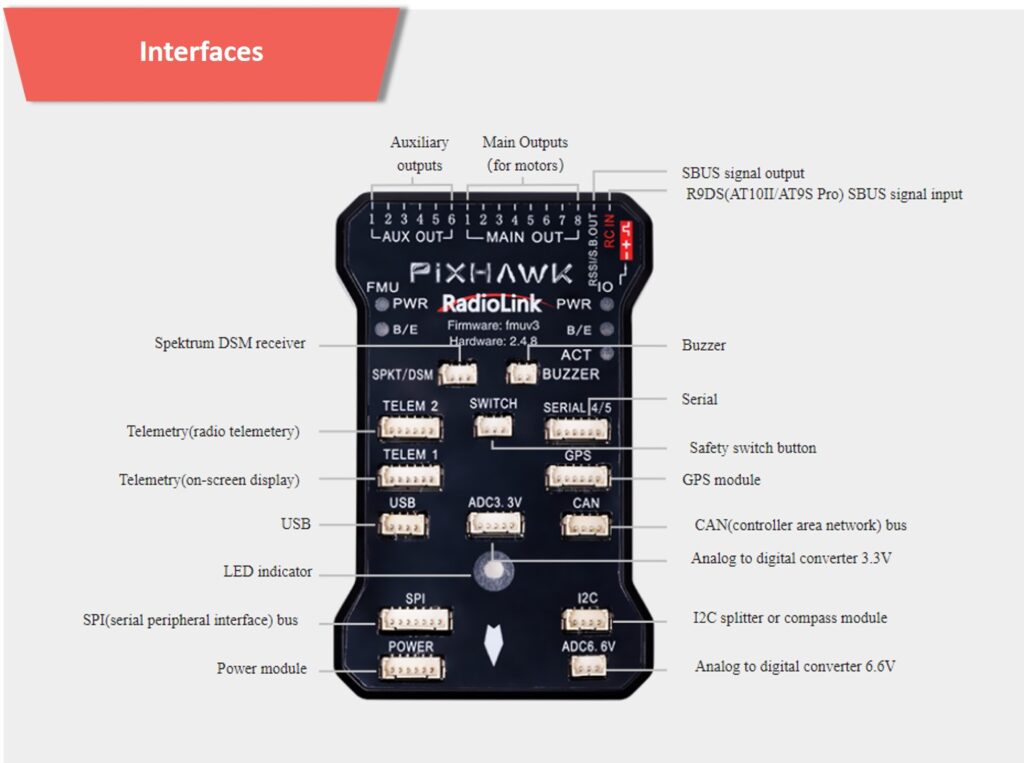
The autopilot has 8 PWM outputs, and 6 PWM auxiliary ports, all of which are configurable.
SDCard slot is provided for logging the flight data for further analysis in case of a crash. You can use Ardupilot and MissionPlanner to control and monitor your drone.
An RGB LED indicator on the flight control for drone shows different states of the autopilot. You can connect the safety switch to the controller for a safer flight. The buzzer is programmed for alarming a different sound for different errors.
Pixhawk 1 Radiolink UAV Flight Controller, is a DIY Open Source Autopilot Drone.
No complicated setup for beginner and professor player, download the Mission Planner from Radiolink website. Via USB cable connect PIX and computer, easy to operation calibration settings on Mission Planner. Then, enjoy your fly.
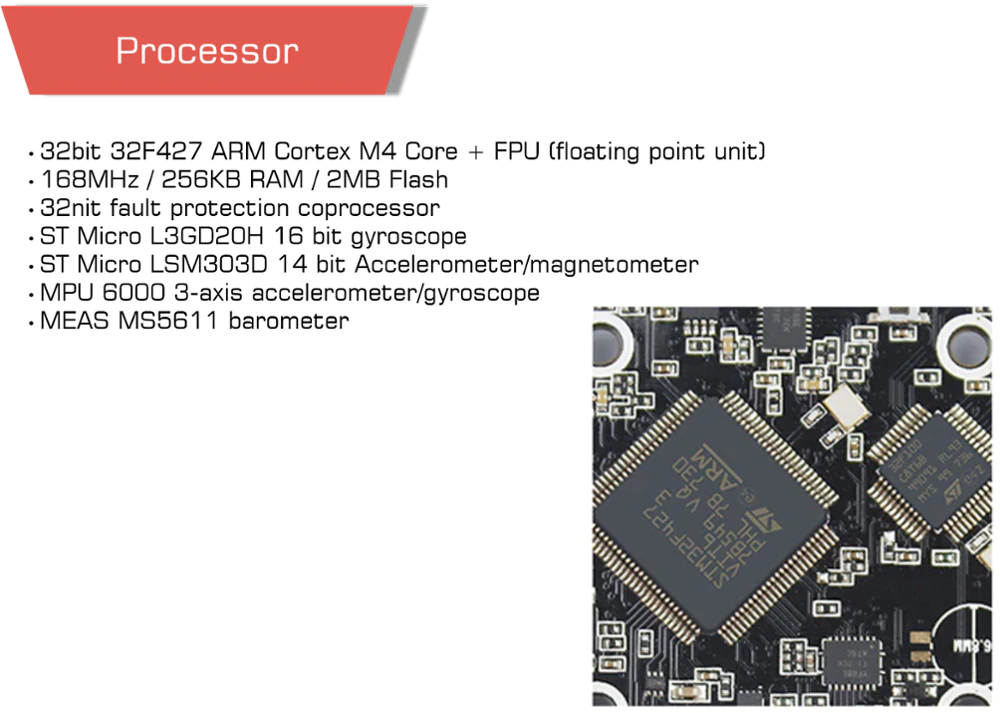
32 bit 32F427 ARM Cortex M4 Core + FPU (floating point unit)
168 MHZ / 256 KB RAM / 2 MB Flash
32bit Fault Protection Coprocessor
ST Micro L3GD20H 16 bit gyroscope
ST Micro LSM303D 14 bit accelerometer/magnetometer
MPU 6000 3-axis accelerometer/gyroscope
MEAS MS5611 barometer
A Good Choice for DIY Drone
Complete installation tutorial, easy to set up, eliminating the cumbersome and complicated installation and calibration process, making your DIY racing drone easier. The Mission Planner can be downloaded from the official website of the Radiolink brand for debugging.
Radiolink PIXHAWK supports a variety of fixed-wing and helicopters, vehicle models and boat models. Supporting Alt hold, Stabilize, Loiter, Pose hold, Return, and other flight modes.


If you have any questions regarding our products, use the Motionew Support team page to consult our engineering team.
| Processors & Sensors | |
| Dimension | 82.2*51.8*16.5mm(3.2*2*0.65″) |
| Weight | 38g(PIXHAWK only) |
| Main Processor | STM32F427VIT6 |
| Coprocessor | STM32F100C8T6 |
| Gyro | MPU6000 |
| E-compass | IST8310 |
| Barometer | MS5611 |
| FRAM | 256 Kb(718 waypoints for multicopter, 724 waypoints for airplane, car and boat ) |
| Port | XH socket |
| SPK/DSM | 1 |
| Mavlink UART | 2 (with CTSRTS) |
| USB Port | 2 |
| Buzzer | 1 |
| Safety Switch | 1 |
| ADC Port | 3.3V*1&6.6V*1 |
| SERIAL4/5 Port | 1 |
| GPS UART | 1 |
| CAN Port | 1 |
| SPI Port | 1 |
| I2C | 1 |
| RC In (TX Signal Supported) | SBUS/PPM |
| RSSI Signal Strength Input | PWM/3.3V |
| PWM Output | 8 OneShot/PWM Output (Configurable) |
| DSHOT Protocol | Support (must upgrade the firmware to V4.0 or above) |
| Aux Output | 6 PWM Output (Configurable) |
| SD Port | 1 |
| Input Voltage | 2-12s |
| Input Current | 90A |
| Output Voltage | 5.1V |
| Output Current (BEC) | 2A |
| USB Voltage | 5V±0.3V |
| Servo Voltage | Input Non-Applicable |
|
Operating Temperature |
-40~80℃ |
| Weight | 30g |
| Dimension | 8.2×4.3X1.7cm |
| Operating temperature | -40 ~ 80°c |
| Case Material | Plastic |
| RAM | 256 KB |
| Flash | 2 MB |
| Accelerometer/Gyroscope | MPU 6000 3-axis |
| Core | 32bit STM32F427 ARM Cortex M4 |
| Package Dimensions | 6.65 x 4.25 x 1.93 inches |
| Connector Port | JST GH connector |
| Receiver In | PPM/SBUS |
| Transmitter | 6 oneshot/PWM |
| USB Voltage | 5v+-0.3v |
| Work Voltage | 5.1v |
| Work Temperature Rang | -40~80° |
| Support Models | Long-wheelbase Quadcopter/6-8 Axis Multirotor |
| Mini Pix Size | 8.2*4.3*1.7cm |
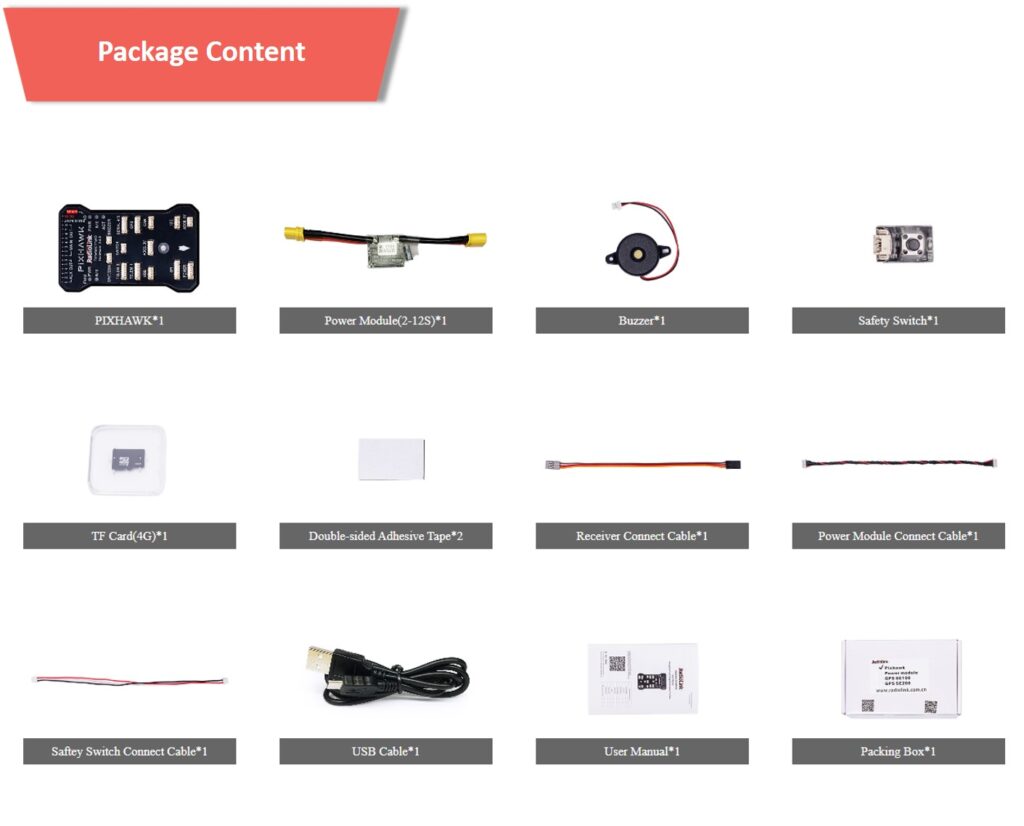
1x Pixhawk autopilot
1x Power module (2~12s)
1x Buzzer
1x Safety Switch
1x TF Card
2x Double-sided Adhesive tape
1x receiver connect cable
1x power module connect cable
1x safety switch connect cable
1x USB cable
1x User manual
1x Packaging box
Optional: 1x GPS SE100 (if chosen during purchase)

In stock

In stock

In stock

In stock
No account yet?
Create an Account










































Lucas Gray –
Molto soddisfatto, comprerò di nuovo.