










467.00 $ – 1,704.00 $
Payment Methods:
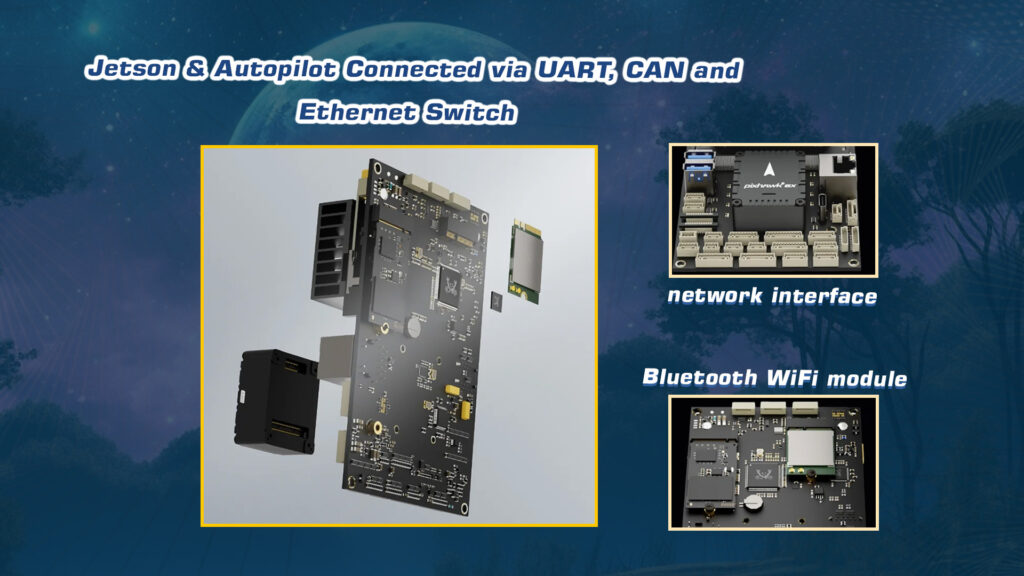
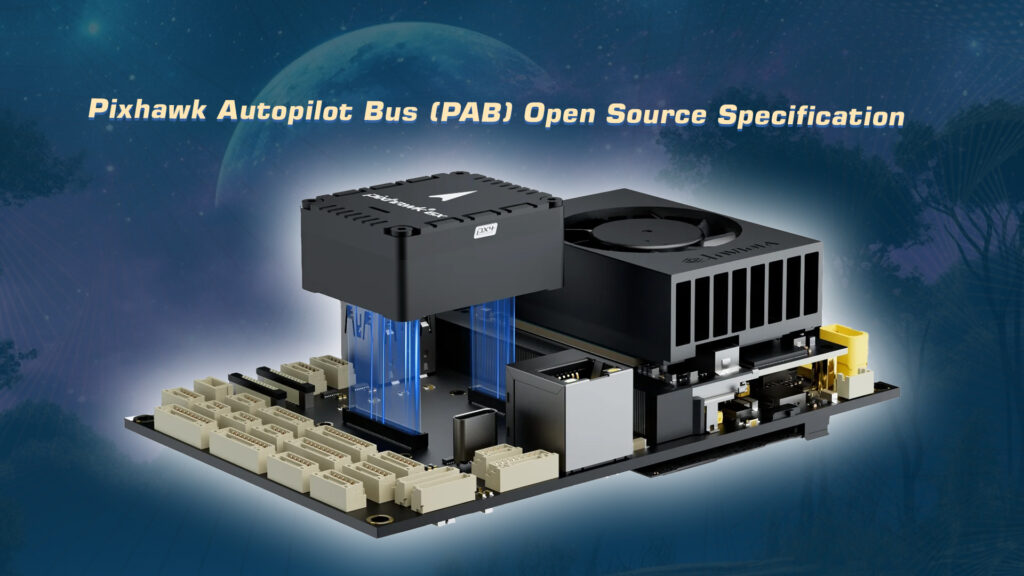
The Holybro Pixhawk 6X with Jetson Baseboard combines the Pixhawk Autopilot Bus (PAB) standard with the NVIDIA Jetson Orin NX/Nano Carrier Board. This integration makes it a powerful platform for advanced autonomous drone applications. The PAB form factor ensures seamless compatibility with other PAB-compliant flight controllers such as Pixhawk 6X.
This setup is perfect for developers and UAV integrators looking to leverage Jetson’s AI capabilities alongside the proven Pixhawk flight control ecosystem.
| Interface | Details |
|---|---|
| Ethernet | 2x Gigabit (8-pin JST-GH, RJ45), via RTL8367S |
| Camera Inputs | 2x MIPI CSI (4 lanes each), 15-Pin FFC |
| USB Ports | 2x USB 3.0 (5A), 2x USB 2.0 (0A), USB-C debug |
| PCIe Slots | Key M 2242 (NVMe x4), Key E 2230 (WiFi/BT x2) |
| Mini HDMI Out | Video output |
| GPIO | 4x (6-pin JST-GH) |
| CAN / SPI / I2C / I2S | Dedicated JST-GH connectors |
| UART Ports | 2x (debug + connected to telem2) |
| Fan Power Port | For active cooling |
| IMU | IIM42652 onboard |
Input Power: XT30, 7V-24V (3S-4S)
Integrated UBEC: Converts 7V-24V to 5.5V for Jetson
External UBEC: Recommended above 4S for redundancy
Power Consumption: Minimum 8V/3A (depends on peripherals)
–Tip: Using an external UBEC alongside the integrated one ensures redundancy and easier maintenance if a BEC fails.
| Interface Type | Details |
|---|---|
| PAB Connectors | 100-pin + 50-pin Hirose DF40 |
| Power Inputs | Redundant modules with overvoltage protection |
| I2C Monitoring | 2x 6-pin Molex CLIK-Mate |
| GPS Ports | Primary: 10-pin JST-GH, Secondary: 6-pin |
| CAN Ports | 2x CAN (4-pin JST-GH) |
| Telemetry Ports | 3x (2x 6-pin JST-GH, 1 linked to Jetson) |
| PWM Outputs | 16 channels (2x 10-pin JST-GH) |
| UART4 + I2C | 6-pin JST-GH |
| Additional Ethernet | Same 2x Gigabit shared via RTL8367S |
| AD & IO | 8-pin JST-GH |
| USB + RC Inputs | USB-C + 4-pin JST-GH, DSM (3-pin), RC (5-pin) |
| SPI Sensor Bus | 11-pin JST-GH |
| Debug Ports | 2x (FMU & IO, 10-pin JST-SH) |
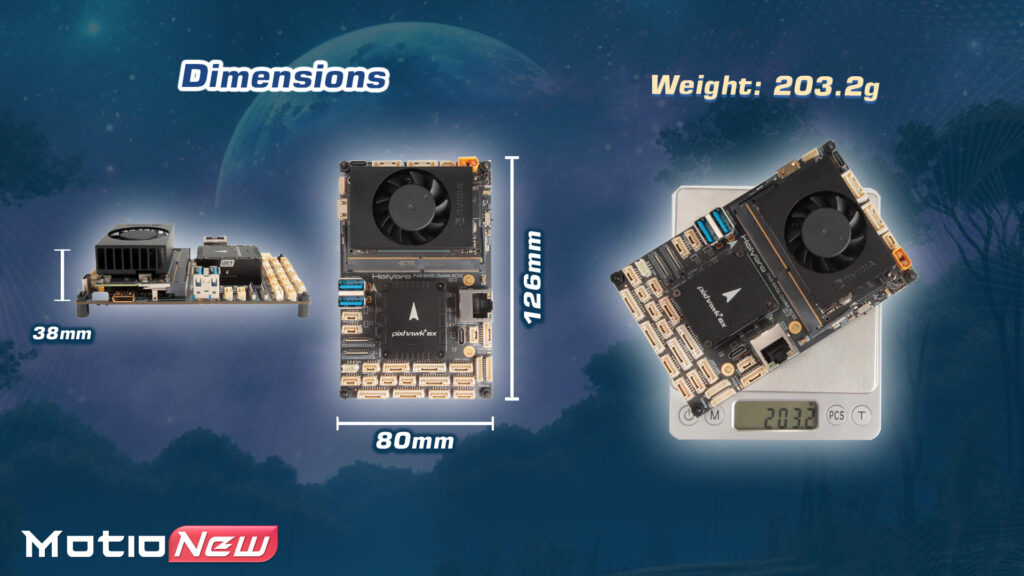
Baseboard Size: 126 x 80 x 38 mm (without Jetson or FC)
Total Weight: ~203.2g (Jetson, Heatsink, FC, M.2 SSD, WiFi)
| Spec | Value |
|---|---|
| Input Voltage | 3~14S (XT30) |
| Output Voltages | 6.0 / 7.2 / 8.0 / 9.2 V |
| Recommended | 7.2V for powering Jetson |
| Output Current | 12A continuous, 24A burst |
| Size & Weight | 48 x 33.6 x 16.3 mm, 47.8g |
Supports advanced AI compute on the edge with NVIDIA Jetson.
Offers extensive connectivity for cameras, sensors, and telemetry.
Designed with redundant power options for reliable UAV operation.
Seamlessly integrates with Pixhawk 6X and other PAB flight controllers.
Need more details or a tailored build recommendation?
Visit our VTOL Drone Store on MotioNew for compatible accessories, cables, GPS, and telemetry modules to complete your project.





If you have any questions regarding our products, use the Motionew Support team page to consult our engineering team.
| FMU Processor of pixhawk6x | STM32H753
32 Bit Arm® Cortex®-M7, 480MHz, 2MB flash memory, 1MB RAM |
| IO Processor |
IO Processor: STM32F103 32 Bit Arm® Cortex®-M3, 72MHz, 64KB SRAM |
| On-board sensors | |
| Accel/Gyro | 3x ICM-45686 (with BalancedGyro™ Technology) |
| Magnetometer | BMM150 |
| Barometer |
ICP20100 & BMP388 |
| Max input voltage Ratings | 6V |
| USB Power Input Ratings | 4.75~5.25V |
| Servo Rail Input Ratings | 0~36V |
| Telem1 output current limiter | 1.5A |
| All other port combined output current limiter | 1.5A |
| Flight Controller Module | 38.8 x 31.8 x 16.8mm |
| Standard Baseboard | 52.4 x 102 x 16.7mm (Aluminum) |
| Mini Baseboard | 43.4 x 72.8 x 14.2 mm |
| Flight Controller Module Weight | 31.3g |
| Standard Baseboard Weight | 72.5g (Aluminum) |
| Mini Baseboard Weight | 26.5g |
with 6X autopilot:
Baseboard only:
This is a GUI-based solution by Nvidia which can be found from the link below:
https://docs.nvidia.com/sdk-manager/install-with-sdkm-jetson/index.html
Note: Keep it in mind that at the time of writing this document we chose to install Jetpack 5.3.1
| Weight | 1.5 kg |
|---|---|
| Dimensions | 9 × 5 × 4 cm |

In stock

In stock

In stock
In stock
No account yet?
Create an Account










































Ava Wright –
Qualità eccellente, molto felice!