
















Pixhawk 4® Holybro UAV autopilot is a Drone Flight Controller advanced designed and made in collaboration with Holybro® and the PX4 team. It is optimized to run PX4 version 1.7, suitable for academic and commercial developers.
It is based on the Pixhawk-project FMUv5 open hardware design and runs PX4 on the NuttX OS.

If you have any questions regarding our products, use the Motionew Support team page to consult our engineering team.
| Weight | 33.3g | |
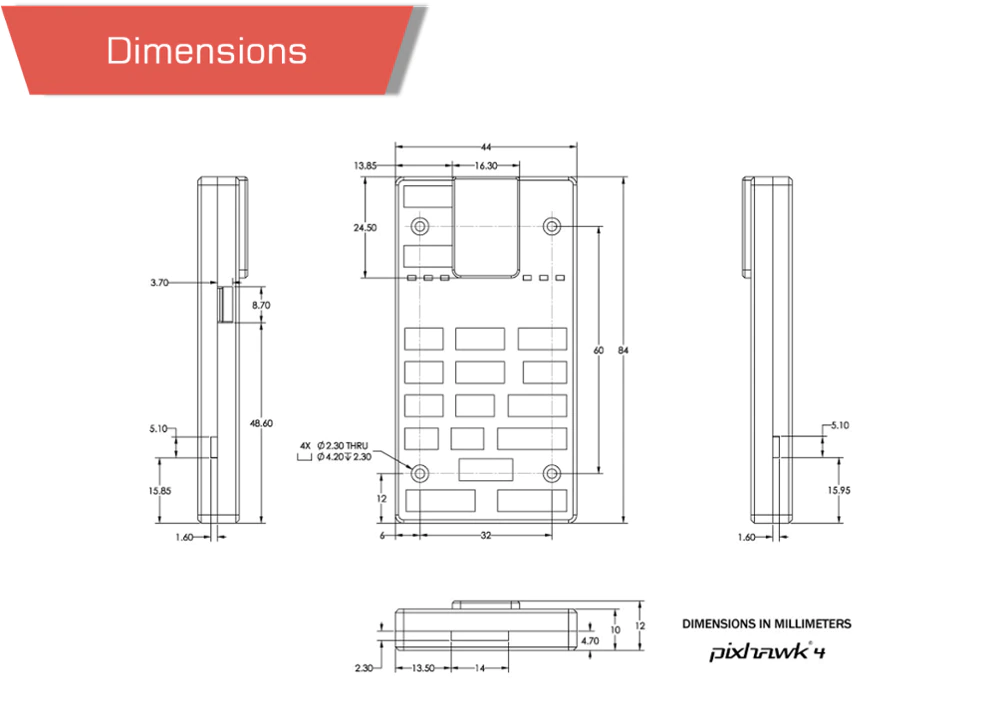
| Dimension | 44x84x12mm | |
| Operating temperature | -40 ~ 85°c | |
| Case Material | Plastic | |
| Main FMU Processor | STM32F765
32 Bit Arm® Cortex®-M7, 216MHz, 2MB memory, 512KB RAM |
|
| IO Processor | STM32F100
32 Bit Arm® Cortex®-M3, 24MHz, 8KB SRAM |
|
| On-board sensors | Accel/Gyro: ICM-20689 Accel/Gyro: BMI055 |
|
| Magnetometer | IST8310 | |
| Barometer | MS5611 | |
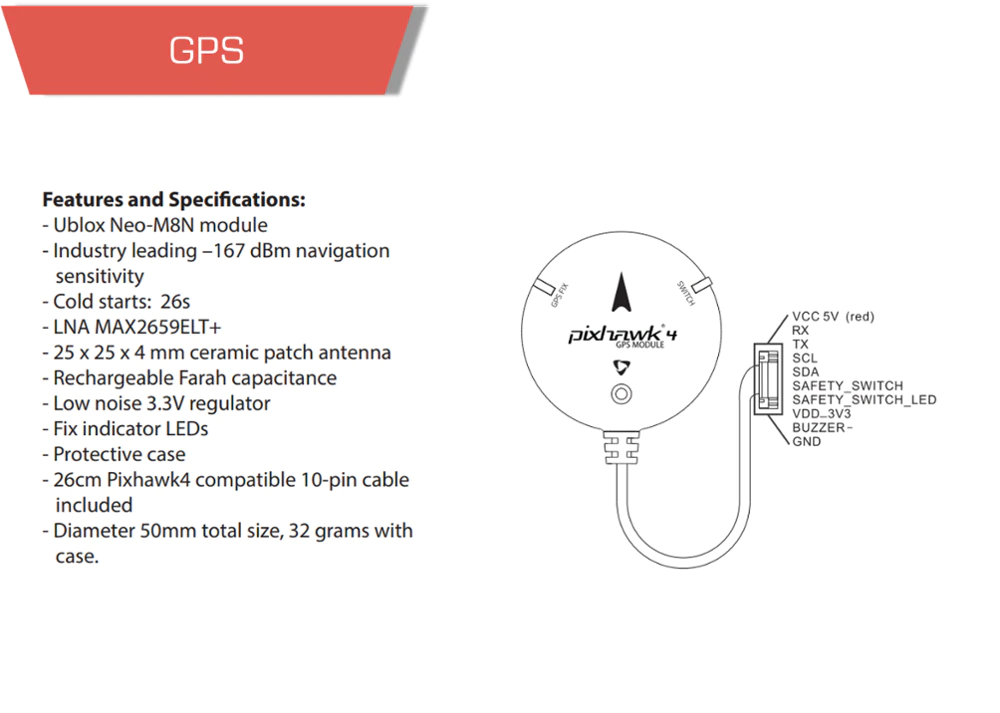
| GPS | ublox Neo-M8N GPS/GLONASS receiver; integrated magnetometer IST8310 | |
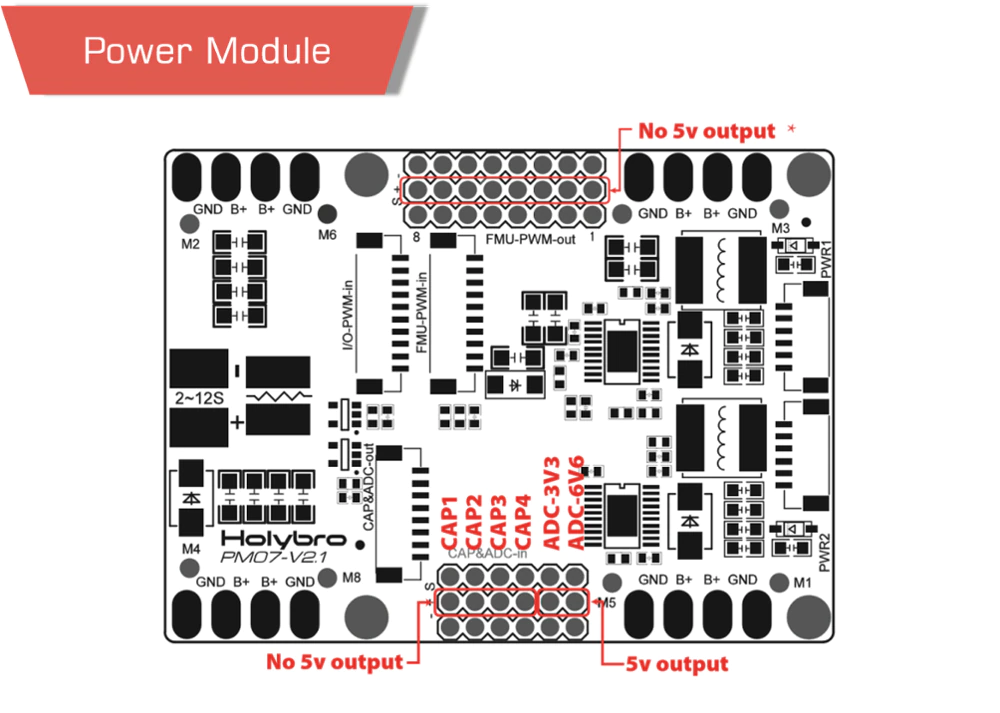
| Power module output | 4.9~5.5V | |
| USB Power Input | 4.75~5.25V | |
| Servo Rail Input | 0~36V | |
Product contents

In stock

In stock

In stock
No account yet?
Create an Account









































Chloe Green –
Excellente qualité et service!