



Price range: 179.97 $ through 257.95 $ Payment Methods:
Sold out












Pixhawk 4 Holybro UAV Flight Controller
![]()
Pixhawk 4® Holybro UAV autopilot is a Drone Flight Controller advanced designed and made in collaboration with Holybro® and the PX4 team. It is optimized to run PX4 version 1.7, suitable for academic and commercial developers.
It is based on the Pixhawk-project FMUv5 open hardware design and runs PX4 on the NuttX OS.

If you have any questions regarding our products, use the Motionew Support team page to consult our engineering team.
Pixhawk 4 Holybro UAV Flight Controller – FAQ
1. What is the main function and design of the Pixhawk 4?
The Holybro Pixhawk 4 is a high-performance flight controller developed in collaboration with PX4. It offers improved processing power, advanced sensors, and modular connectivity for a wide range of UAV applications.
2. What processor and sensor components are integrated?
It features an STM32F765 microcontroller, dual IMUs (BMI055 and ICM-20689), dual barometers (MS5611), and integrated vibration isolation for enhanced flight precision and sensor reliability.
3. What interfaces and firmware compatibility options are supported?
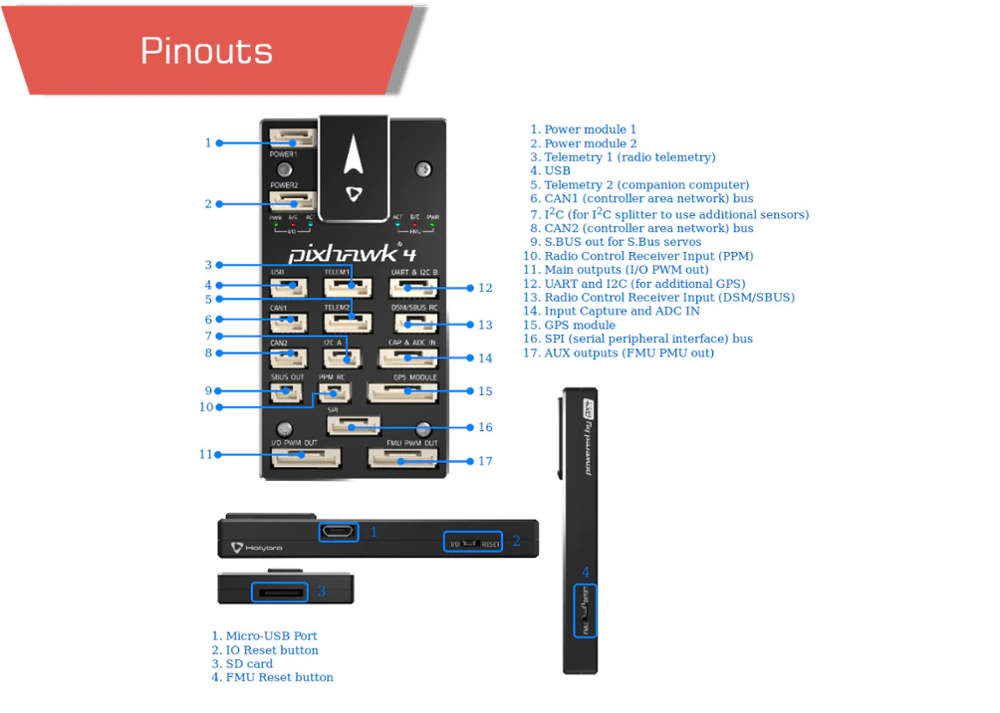
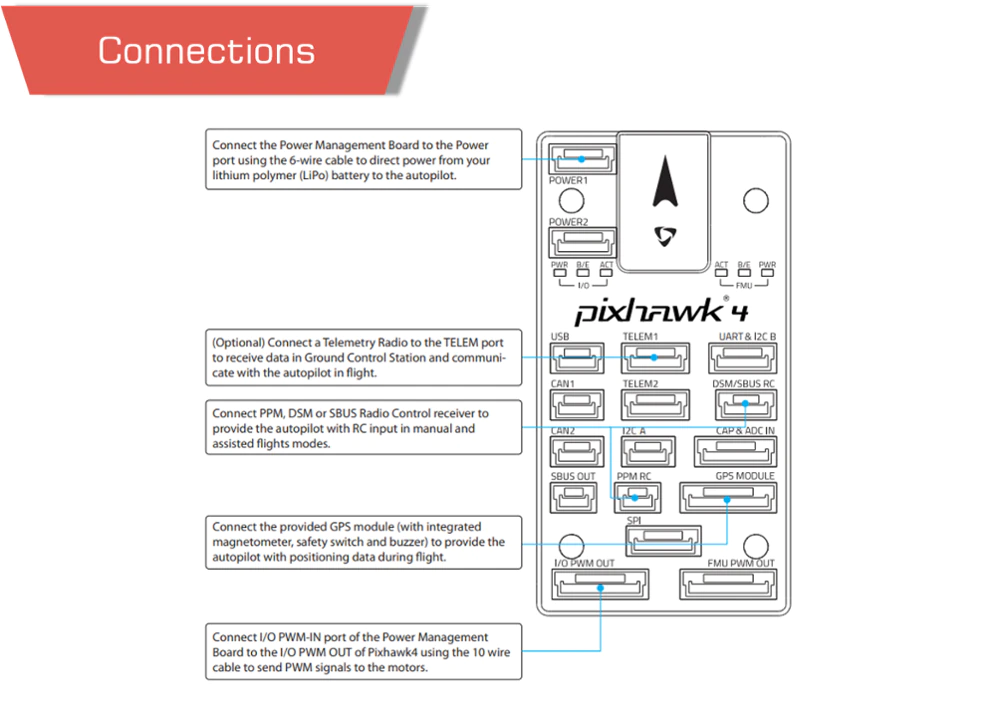
Pixhawk 4 supports multiple UART, I2C, CAN, and SPI ports and is compatible with both PX4 and ArduPilot firmware. It also includes dedicated ports for GPS, telemetry, and external sensors.
4. What are the purchasing and delivery options for the Pixhawk 4?
The flight controller is available as a standalone module or in bundles with GPS and power modules. Motionew provides international shipping with tracking and estimated delivery times displayed during checkout.
5. Does Motionew support OEM and bulk purchasing for this model?
Yes. OEM and bulk purchase programs are available for UAV manufacturers and enterprise clients. Buyers can request customized harnesses, firmware pre-configuration, and quantity-based pricing through Motionew’s sales department.
6. What documentation and support resources are provided?
Detailed wiring diagrams, setup guides, and configuration manuals are available in the documentation section. Firmware updates and technical support are provided through Holybro, PX4, and Motionew’s engineering teams.
| Weight | 33.3g | |
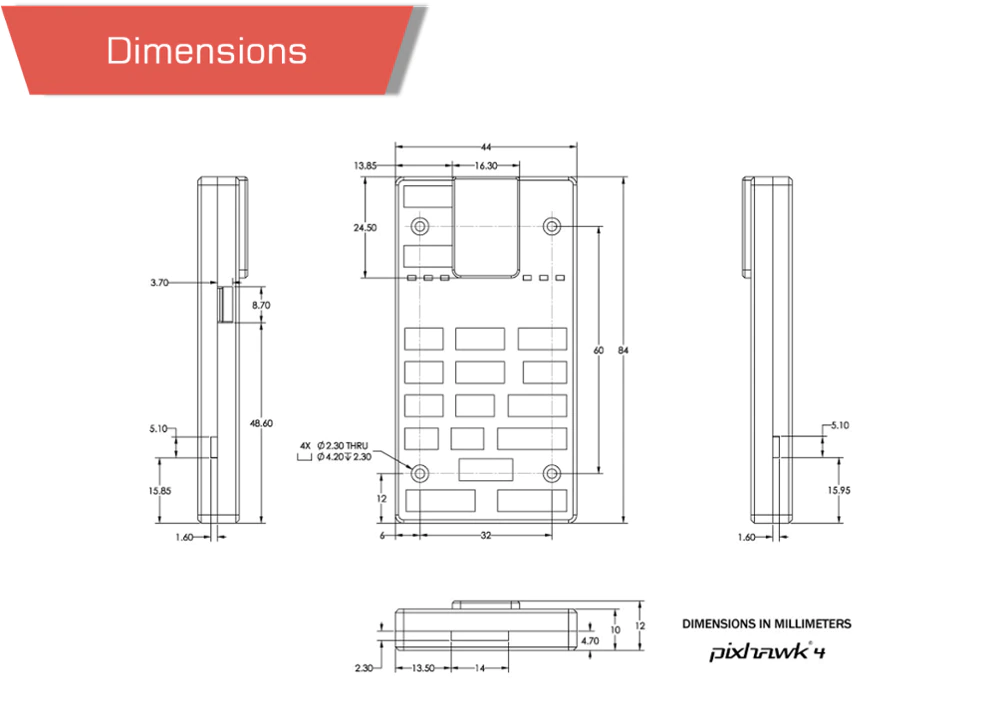
| Dimension | 44x84x12mm | |
| Operating temperature | -40 ~ 85°c | |
| Case Material | Plastic | |
| Main FMU Processor | STM32F765
32 Bit Arm® Cortex®-M7, 216MHz, 2MB memory, 512KB RAM |
|
| IO Processor | STM32F100
32 Bit Arm® Cortex®-M3, 24MHz, 8KB SRAM |
|
| On-board sensors | Accel/Gyro: ICM-20689 Accel/Gyro: BMI055 |
|
| Magnetometer | IST8310 | |
| Barometer | MS5611 | |
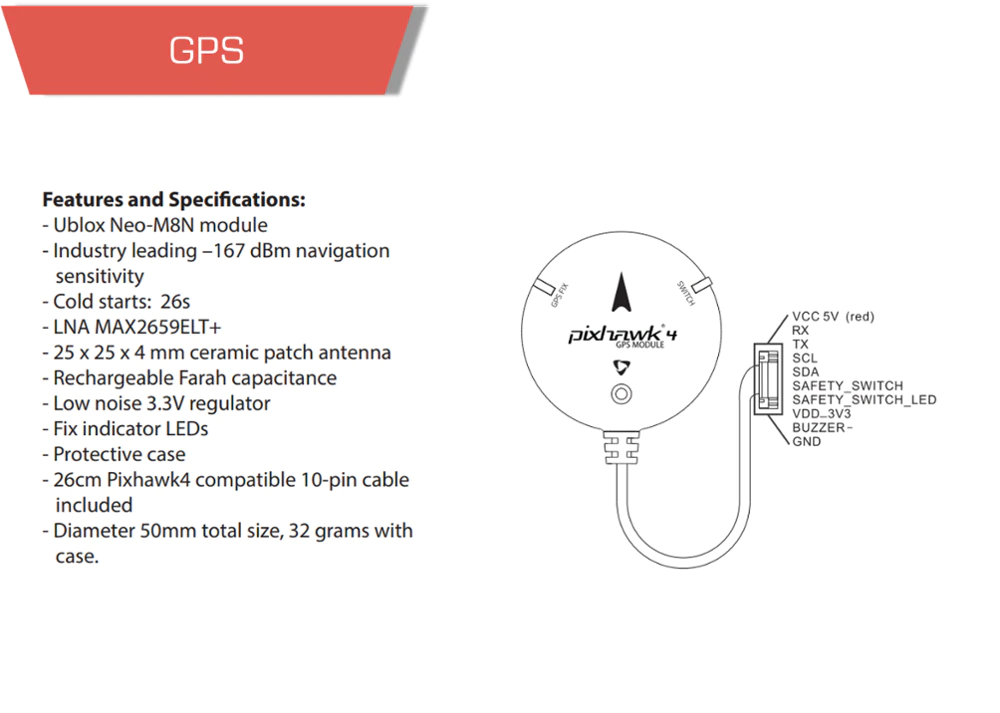
| GPS | ublox Neo-M8N GPS/GLONASS receiver; integrated magnetometer IST8310 | |
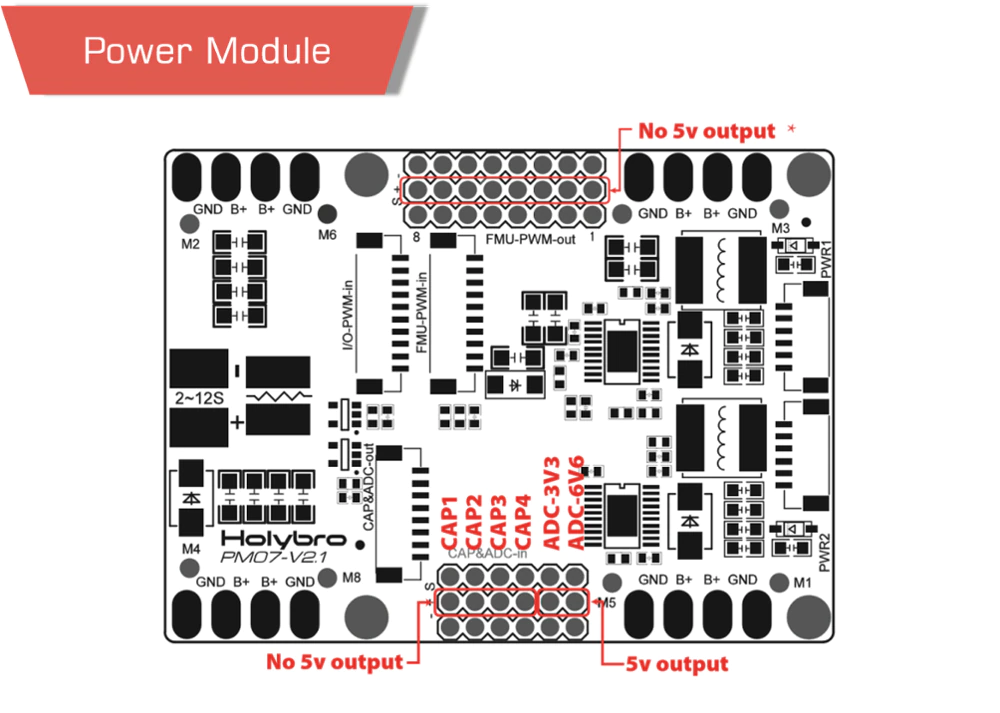
| Power module output | 4.9~5.5V | |
| USB Power Input | 4.75~5.25V | |
| Servo Rail Input | 0~36V | |
Product contents
You must be logged in to post a review.

No account yet?
Create an Account











































Chloe Green –
Excellente qualité et service!