





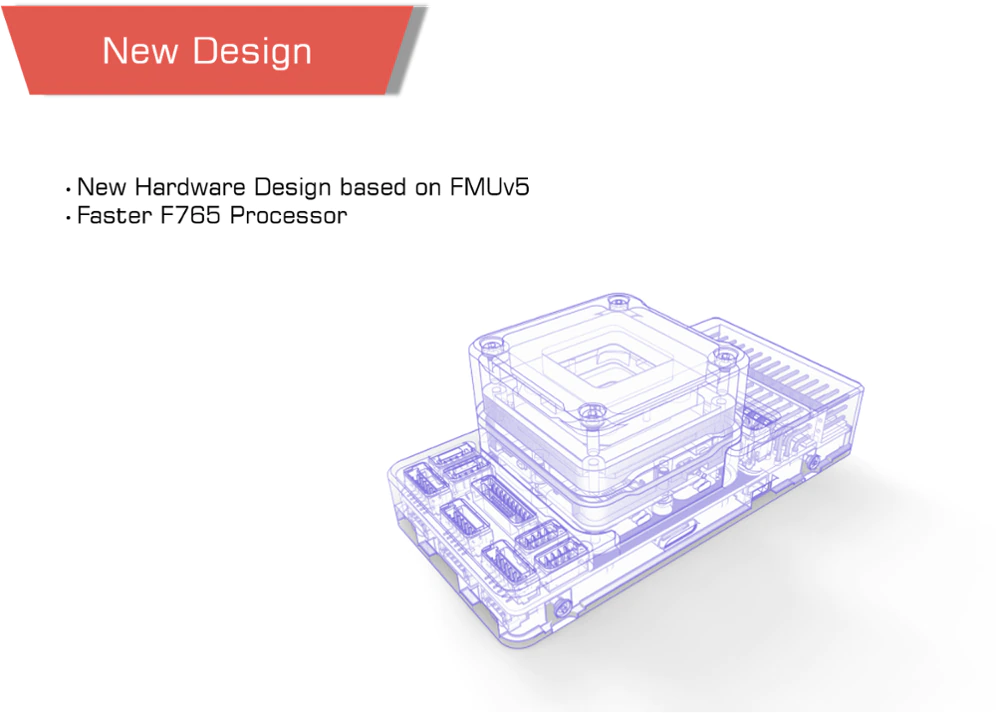
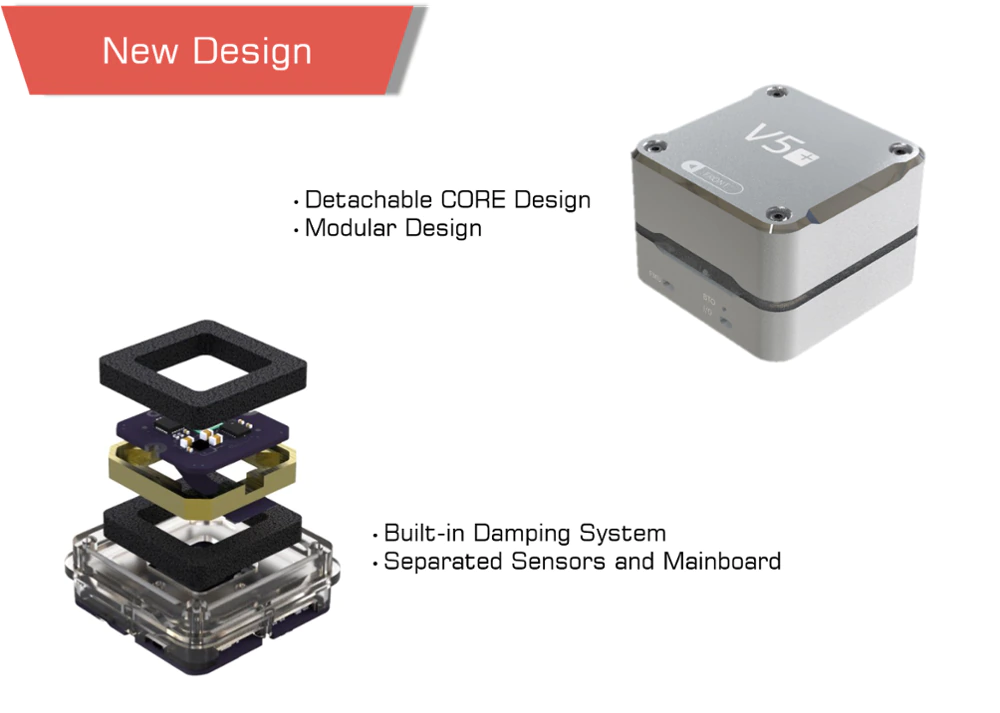
Designed for academic and commercial integrators, the CUAV Pixhawk V5+ AutoPilot is a high-end drone autopilot flight controller for academic and commercial applications. The PX4 team collaborated with CUAV to create the design for the system. An open hardware design based on Pixhawk FMUv5, this board is highly modular and uses standard PinOuts for its external interface, providing it with the ability to integrate carriers with the board. In addition to the built-in PX4 Open Source Autopilot, ArduPilot fully supports this drone flight controller out of the box.
Here’s a quick summary of what you need to know
The main FMU processor is the STM32F765
216MHz, 32 bit Arm® Cortex®-M7 processor, 2MB memory, 512KB RAM chip
The IO processor is the STM32F100
A 32-bit Arm® Cortex®-M3, 24MHz, 8KB memory chip is used in this device
Sensors on the board include:
Accelerometer/Gyroscope: ICM-20689
Accelerometer/Gyroscope: BMI055
Magnetometer: IST8310
Barometer: MS5611
This product has the following features:


If you have any questions regarding our products, use the Motionew team of experts page to consult our engineering team.
| Compatible Brand | PX4 / Ardupilot |
| Weight | 90g |
| Dimension | 85.5x42x33mm |
| Operating temperature | -20 ~ 80°C |
| outputs | 8-14 PWM(6 from IO, 8 from FMU) |
| ports | 4 I2C
4 SPI buses 2 CANBuses with serial ESC 5 general purpose serial ports Analog inputs for voltage / current of 2 batteries |
| Power | 4.3~5.4V |
| USB Input | 4.75~5.25V |
| Servo Rail Input | 0~36V |
| Dimensions | 85.5*42*33mm |
| Operating temperature | -20 ~ 80°c(Measured value) |
Product contents

In stock
In stock
In stock
No account yet?
Create an Account










































James Martin –
هذا المنتج ممتاز، سأشتريه مرة أخرى.