



Price range: 158.85 $ through 239.82 $ Payment Methods:
Sold out











Pixhawk Holybro 4 Mini ,UAV Autopilot Flight Controller
![]()
The Pixhawk® Holybro 4 Mini autopilot is designed for engineers and hobbyists who are looking to tap into the power of Pixhawk 4 but are working with smaller drones. Pixhawk 4 Mini takes the FMU processor and memory resources from the Pixhawk 4 while eliminating interfaces that are normally unused. This allows the Pixhawk 4 Mini to be small enough to fit in a 250mm racer drone.
Pixhawk 4 Mini was designed and developed in collaboration with Holybro® and Auterion®. It is based on the Pixhawk FMUv5 design standard and is optimized to run PX4 flight control software.




1. What is the Pixhawk 4 Mini used for?
It is a compact autopilot flight controller designed for smaller-frame UAVs that demand high-performance features.
2. Does it support popular autopilot firmware platforms?
Yes, it supports the PX4 open-source stack and is also compatible with the ArduPilot ecosystem.
3. What are its key specifications?
It uses an STM32F765 processor with 2 MB flash and 512 KB RAM. On-board sensors include an accelerometer/gyroscope, magnetometer, and barometer.
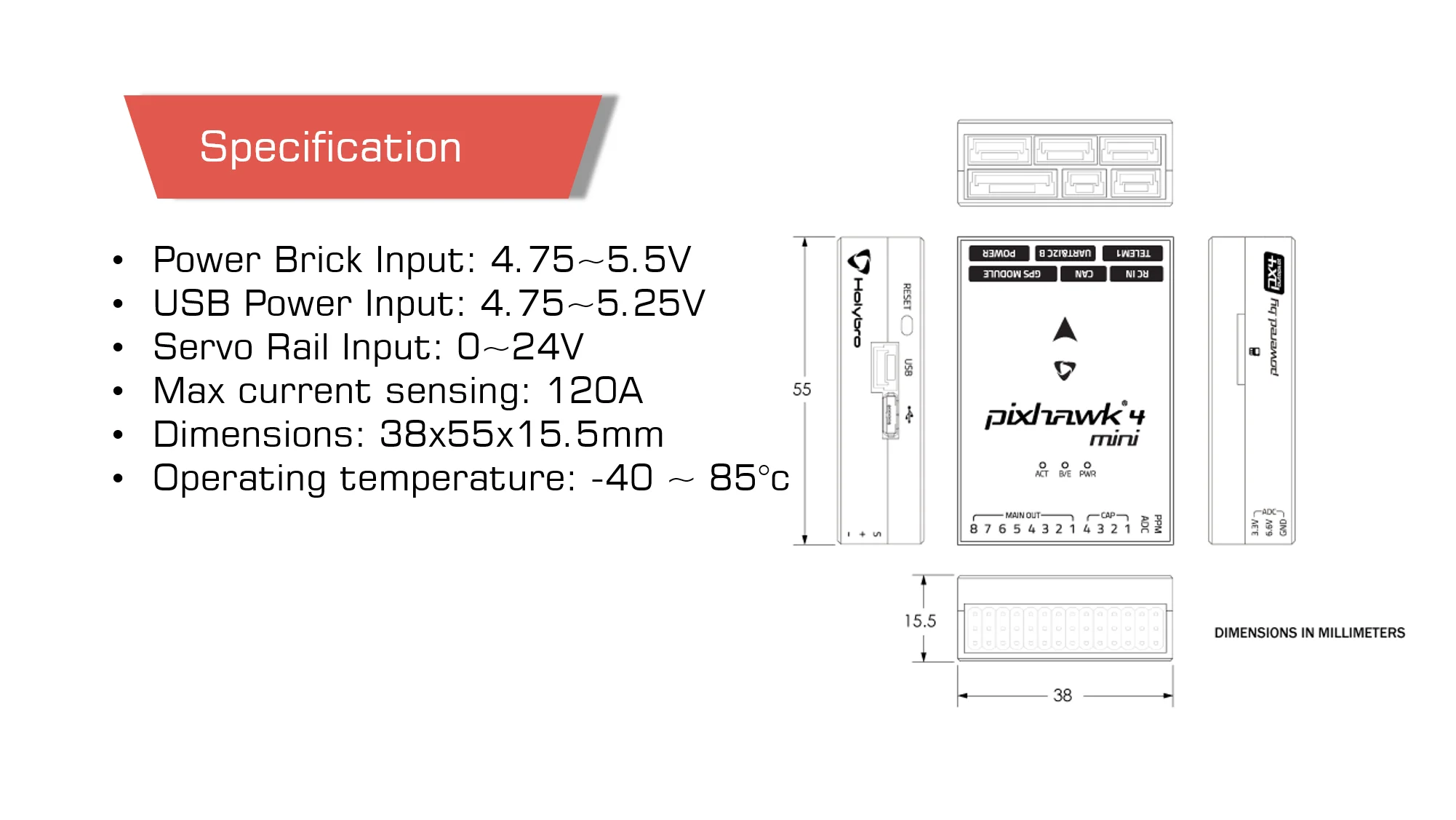
4. What power input requirements does it support?
It accepts power brick input around 4.75–5.5 V, USB input around 4.75–5.25 V, and a servo rail up to 24 V with current sensing capability.
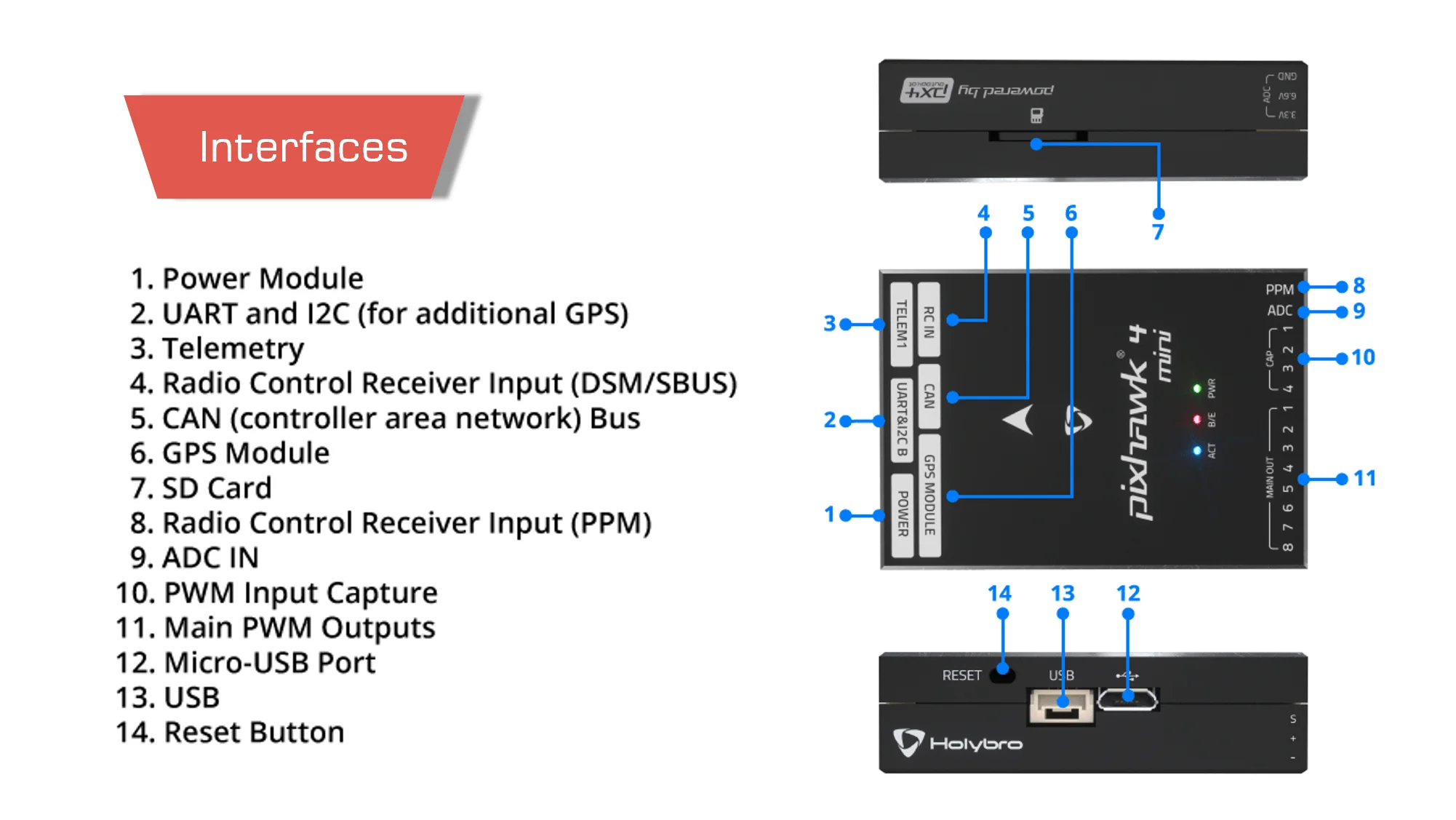
5. How many outputs and interfaces are available?
It provides multiple PWM outputs, UARTs, I2C, SPI, and CAN bus for connecting peripherals and sensors.
6. Is this product suitable for industrial UAV deployments?
Yes, its high-performance hardware and compact design make it suitable for professional and light-industrial UAVs.
Product contents
Please contact us for more information.
You must be logged in to post a review.

No account yet?
Create an Account











































Olivia King –
빠르고 좋은 서비스였습니다.