



Please Note: Shipments to the United States may experience delays because of the new regulations and interruptions due to the inspection at the U.S. customs. We appreciate your understanding and patience

The Holybro® company is about to release the latest models of Pixhawk, so we are going to take a look at similar previous products to try to come up with some useful and valuable tips and ideas about what we should expect from these upcoming models, which we will call the Pixhawk 6X and Pixhawk 6C. This is because here at Motionew, we strive to provide the latest information on the newest drone products and latest releases. New Pixhawk 6X and Pixhawk 6C autopilot development kits will be a great addition to the Pixhawk family of products as great tools for developers at corporate research labs, startups, as well as academicians (research, professors, and students). In order to find the latest information about other related products, please visit our Flight Controllers category.
PIXHAWK is the defacto standard for those wishing to build ubiquitous autonomous systems that support a better future for humanity by providing a collection of guidelines and hardware specifications that are easily available for the development of drone systems. As part of the Pixhawk Special Interest Group coordinated by the Dronecode Foundation, this standard provides a complete set of mechanical and electrical requirements and guidelines for creating an interoperable drone system. It is currently being developed by the Pixhawk Special Interest Group.
The original prototype, referred to as “Pixhawk”, was developed about a decade ago by students at the ETH Zurich. During that time, the team could not have imagined that this project would end up having such a significant impact on the drone industry. Since the team has been working together, they have created MAVLink, Pixhawk, PX4, and QGroundcontrol, which are the most widely used standards for flight control hardware and autopilot software in the drone industry. The success of this very successful open-source project has now overtaken the success of individual corporate development.
A comparison of the different versions of open-hardware flight management units developed by Pixhawk between 2012 and 2020 is presented in the following image. According to what can be seen from the screenshot below, the most current version is the FMUv6X version which features an H7 STM32 MCU. However, a new version has been proposed, known as FMUv6C, which features a more cost-effective STM32 MCU, which is already accessible through the Holybro inventory.
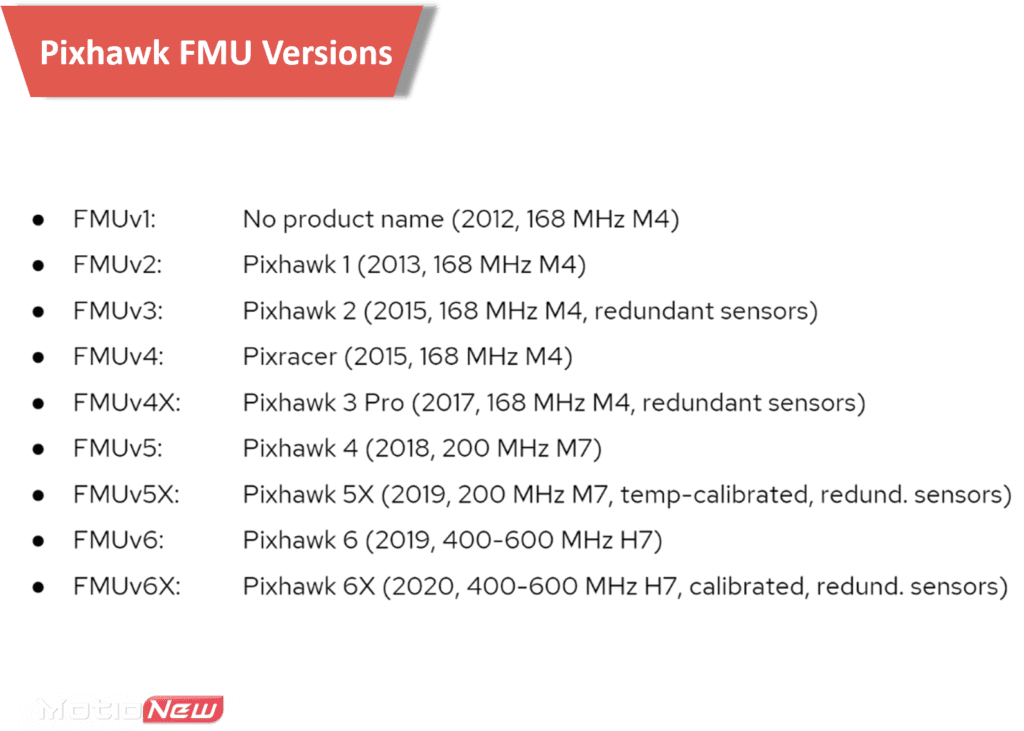
As a result of the ongoing chip shortage crisis caused by the COVID-19 pandemic, many current STM32 microcontrollers models have become quite expensive and hard to obtain. Due to this, many of the older autopilot versions that rely on these MCUs have either been discontinued or become quite costly as a consequence of this. Fortunately, there is still a large number of available MCUs on the market, as there have been plenty of alternatives to the previous MCUs. However, it is also important to note that we will need to port and modify the firmware for each MCU chip separately.

The Pixhawk 6C and Pixhawk 6X are the latest additions to the successful Pixhawk family of flight controllers. As a result of a collaborative effort between Holybro® and the PX4 teams, these advanced autopilots are designed and manufactured to the highest standard. The Pixhawk-project FMUv6 open hardware design is based on the NuttX OS and runs PX4 on the Pixhawk-project FMUv6 Open Hardware design. These releases replace the MCUs in the FMUv5X version with H7 type MCUs, and are suitable for academic, commercial, and hobbyist developers.
In this article, we will delve deeper into the distinctions between the Pixhawk 6X vs Pixhawk 6C models, providing insights into their respective features, performance, and suitability for various applications.

At the time of this writing, we are unable to provide exact information regarding the preinstalled firmware on Pixhawk 6C and Pixhawk 6X. What can be said is that the preinstalled firmware can either be PX4 or Ardupilot, and it is highly likely that these versions come with PX4 preinstalled due to the fact that they are made by Holybro®. We anticipate these latest models of Pixhawk to be released in June 2022. Furthermore, the differences between the 6X and 6C versions are not clear at this point, but it is likely that they pertain to the sensors, interfaces, and the specific STM32 MCUs that are involved.
There is also a point to mention here that, according to the FMUv6X documentation, the 6X version has the same architecture as that of v5X, except it is based on the H7 microcontroller family. Here is a schematic of the FMUv6X architecture. There is also a point to mention here that, according to the FMUv6X documentation, the 6X version has the same architecture as that of v5X, except it is based on the H7 microcontroller family.
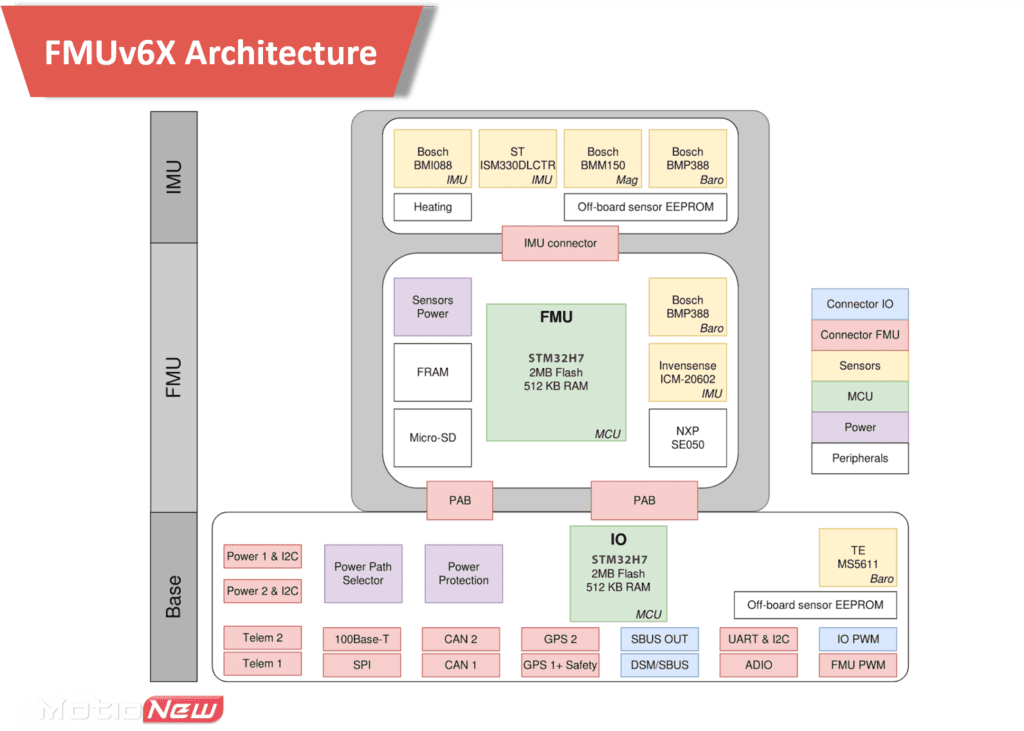
Clearly seen in the picture above, the 6X version of our autonomous vehicle controllers features the currently most advanced processor technology from STMicroelectronics®, sensor technology from Bosch® and InvenSense®, and a real-time operating system called NuttX to deliver the best possible performance, flexibility, and reliability. In addition to that, a high-performance, low-noise IMU on board is specifically designed for stabilization applications. Sensor signals are routed to separate interrupt and timer capture pins on the autopilot in order to allow precise time stamping of sensor data, allowing the autopilot to provide data from all of the sensors simultaneously. Using vibration isolations will allow for more accurate measurements to be taken, thus allowing for vehicles to reach better performance levels.
Detailed pinouts for the FMUv6X open-hardware version of the Autopilot v6X are presented in the Pixhawk Autopilot v6X standard.
A proposal for the FMUv6C version was recently proposed, back in April of 2022. It is proposed that the FMUv6C version of the FMUv6X will be the cost-effective counterpart to the FMUv6X version that uses the H743VIh6 STM32 microcontroller. In order to find out more about this proposal, please watch the following video.
Visit the Motionew Online Shop to view our entire product line to see the latest product and more products similar to this new pixhawk.
No account yet?
Create an AccountNeed help?









































